Ürün Açıklaması
KSMIT3: Bağımsız Bir Tutum Başlığı ve Referans Sistemi
KSMIT3, tamamen işlevsel, bağımsız bir modül olarak gelen, son teknoloji ürünü bir Tutum Başlık ve Referans Sistemidir. Tasarımı, herhangi bir sisteme entegrasyonu kolaylaştıran sınırlı sayıda donanım bileşenine dayanmaktadır.
Bu yenilikçi sistem, veri mesajlarının frekans, çıktı formatı ve veri açısından özelleştirilmesine olanak tanıyan, tamamen belgelenmiş ve endüstri standardında bir iletişim protokolüne sahiptir. Sinyal tamamen ana bilgisayardaki kaynakların yalnızca küçük bir kısmını kullanan kartta işlenir. Bu özellik KSMIT3'ü basit MCU işletim ortamlarında kullanım için ideal kılar.
KSMIT3, 1 derece RMS'lik takla ve yunuslama doğruluğu ve 2 derece RMS'lik sapma doğruluğu ile dinamik koşullar altında yüksek doğruluk sunar. Çıkışı son derece kararlı olduğundan, dronlar gibi herhangi bir nesnenin veya navigasyonun kontrolünde ve stabilizasyonunda kullanım için mükemmeldir.
Özellikler
● 12,1 x 12,1 mm modüllerde tam performanslı AHRS
● Çevirme/pITch doğruluğu (dinamik) 1,0 derece
● Yön doğruluğu 2,0 derece
● Ana işlemci için son derece düşük gereksinimler
● Ürün yaşam döngüsünün tamamı için birleşik arayüz
● Düşük güç (3,0V'de 45 mW)
● PLCC28 PCB ile uyumlu (12,1 x 12,1 x 2,6 mm)
Teknik Parametreler
| ÖĞE |
PARAMETRELER (TİPİK DEĞERLER) |
| TUTUM DOĞRULUĞU |
Sapma doğruluğu (dinamik) |
2 derece (rms) |
| Yuvarlanma / eğim doğruluğu (dinamik) |
1 derece (rms) |
| JİROSKOPLAR |
Tam ölçek |
±2000°/s |
| Çalışma içi sapma kararlılığı |
10°/saat |
| Doğrusal Olmama |
%0,1 |
| Ölçek Faktörü değişimi |
%0,05 |
| g-DUYARLILIK |
0,1°/s/g |
| Gürültü yoğunluğu |
0,01°/s/√Hz |
| Bant genişliği (-3dB) |
180 Hz |
| İVME ÖLÇERLER |
Tam ölçek |
±16g |
| Çalışma içi sapma kararlılığı |
0.1mg |
| Doğrusal Olmama |
%0,5 |
| Ölçek Faktörü değişimi |
%0,05 |
| Gürültü yoğunluğu |
200 μg/√Hz |
| Bant genişliği (-3dB) |
180 |
| MANYETOMETRE |
Tam ölçek |
6gauss |
| Doğrusal Olmama |
%0,1 |
| Çözünürlük |
120 ugaus |
| Gürültü (rms) |
50 ugaus |
| ARAYÜZLER |
Besleme gerilimi |
3.3vDC |
| seri port iletişimi |
TTL |
| Çıkış frekansı |
100hz@230400 baud hızı |
Referans çerçeveleri
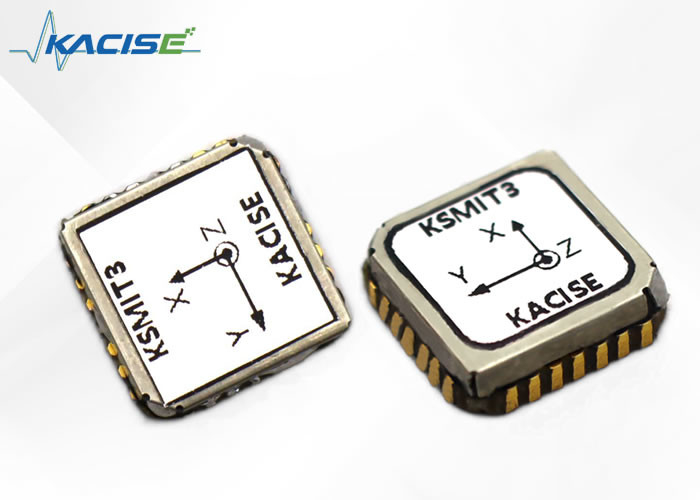
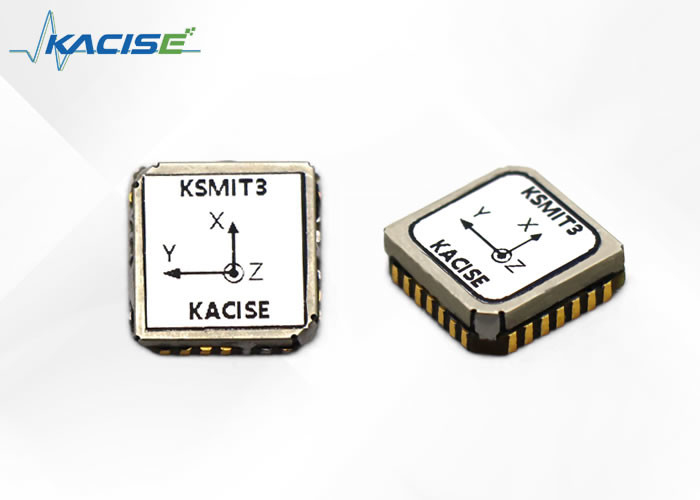
KSMIT3 sağ koordinat sistemini kullanır ve varsayılan sensör çerçevesi Şekil 13'te gösterildiği gibi tanımlanır. Sensör çerçevesi kökeninin daha kesin konumu için Donanım Entegrasyonu kılavuzuna bakın. Çıkış referans koordinat sistemiyle birlikte yaygın olarak kullanılan veri çıkışlarından bazıları Şekil 1'de listelenmiştir.
 Şekil 1 KSMIT3 Modülü için Varsayılan Sensör Sabit Koordinat Sistemi
Şekil 1 KSMIT3 Modülü için Varsayılan Sensör Sabit Koordinat Sistemi
Kullanıcı iletişim protokolü
Baud hızı 115200bps, 230400bps ve 460800bps'dir. Veri bIT 8, durdurma biti 1, kontrol biti yok. Yüksek baytlar önce gelir, düşük baytlar ise en sonda gelir. Veri güncelleme frekansı f=100Hz. Varsayılan baud hızı 230400bps'dir.
| Bayt Sayısı |
İsim |
Bayt Türü |
Büyüteç-katyon |
Menzil |
BMBT |
Tanım |
| 1~2 |
Çerçeve Başlığı |
U,2 |
|
|
|
0XAA 71 |
| 3 |
Çerçeve Formatı Numarası |
Sabit Değer 3=0x03 |
| 4 |
İletişim Çerçevesi Uzunluğu |
Sabit Değer 100=0x64 |
| 5~13 |
Jiroskop |
S,3*3 |
1e-4 |
±838.8608 |
°/sn |
X/Y/Z Sağ/Ön/Üst |
| 14~22 |
Hesap |
S,3*3 |
1e-5 |
±83,88608 |
G |
X/Y/Z Sağ/Ön/Üst |
| 23~28 |
Magn |
S,3*2 |
1e-2 |
±327,68 |
uT |
X/Y/Z Sağ/Ön/Üst |
| 29~31 |
Hbar |
S,1*3 |
1e-2 |
±83886,08 |
mbar |
Barometre |
| 32 |
Bayrak |
U,1 |
|
|
|
BIT1-Manyetik Geçerli İşaret 1- Geçerli
BIT2-Barometrik Geçerli Bayrak 1- Geçerli
BIT3-GPS_exist
GPS Bilgisi exIT veya hayır
0- GPS Bilgisi Yok
1- GPS Bilgileri Mevcuttur
BIT4-GPS Bilgileri Geçerli İşareti 1- Geçerli
BIT5-8 Sıfır Doldurma
|
| 33~40 |
Sisteme Ayrılmış Kelimeler |
|
|
|
|
|
| 41~49 |
GPS_Vele/N/U |
S,3*3 |
1e-4 |
±838.8608 |
m/sn |
GPS Doğu/Kuzey/Gökyüzü Hızı |
| 50~60 |
GPS_Lon/Lan |
S,2*4 |
1e-7 |
±214,7483648 |
° |
GPS Boylam/GPS Enlem |
| GPS_Hmsl |
S,1*3 |
1e-2 |
±83886,08 |
M |
GPS Yüksekliği |
| 61~62 |
GPS_Headmot |
S,1*2 |
1e-2 8 |
±327,6 |
° |
GPS Yönü |
| 63 |
GPS_Durumu |
U,1 |
|
|
|
BIT1~4-GPS Konumlandırma Uydularının Sayısı (Maksimum 15)
BIT5 -GPS Konumlandırma İşareti 1 Geçerli
BIT6~8- GPS Konumlandırma Tipi
GPS_ Sabitleme türü
0x00=Düzeltme Yok
0x01=Yalnızca Ölü Hesaplama
0x02=2d Düzeltme
0x03=3d-Düzeltme
0x04=Gnss+Ölü Alma Kombine
0x05=Yalnızca Zaman Düzeltmesi
|
| 64~65 |
GPS_Pdop |
U,2 |
1e-2 |
|
|
|
| 66~71 |
Ins_Att |
S,2*2 |
1e-2 |
±327,68 |
° |
Eğim ±90° Döndürme ±180° |
| S,1*2 |
655,36 |
° |
Yaw ±180° |
| 72~80 |
Vn |
S,3*3 |
1e-4 |
±838.8608 |
m/sn |
Vel_E/N/U |
| 81~89 |
Poz |
S,2*4 |
1e-7 |
±214,7483648 |
° |
Boylam/ Enlem |
| S,1*3 |
1e-2 |
±83886,08 |
M |
Rakım |
| 92 |
Modlar ve Senaryolar |
U,1 |
|
|
|
BIT1~4- Çalışma Modu
Hizala=1; Ins=2; Ahrs=3;Vg=4
BIT5~8- Çalışma Senaryosu
1=Yerde ;2=İç Mekan; 3=Yerleşik 4=Sabit Kanat;5=Rotor
|
| 93~96 |
Rezerv |
|
|
|
|
Sıfır Doldurma |
| 97~98 |
Sıcaklık |
S,2 |
1e-2 |
±327,68 |
°C |
|
| 99 |
Saymak |
U,1 |
|
|
|
|
| 100 |
Kodu Kontrol Et |
|
|
|
|
BIT Kontrolünden Önceki Tüm Karakterleri Topla |
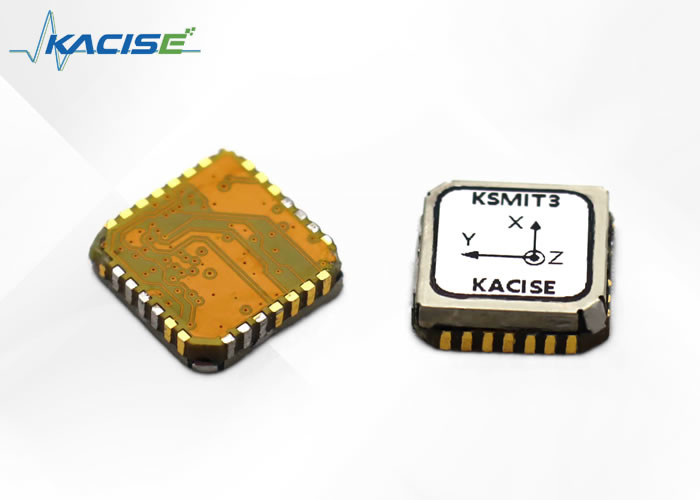
Pim yapılandırması
Şekil 2: KSMIT3 modülünün pin konfigürasyonu (üstten görünüm)
| Sayı |
İsim |
Tip |
Tanım |
| 7 |
VDDIO |
Güç |
DİJİTAL besleme gerilimi |
| 8 |
GND |
| 23 |
UART_RX |
UART arayüzü |
Alıcı veri girişi |
| 24 |
UART_TX |
UART arayüzü |
VERİCİ veri çıkışı |
| 25 |
GND |
| 18 |
AUX_RX A |
Yardımcı GNSS arayüzü |
GNSS modülünden alıcı veri girişi |
| 19 |
UX_TX |
Yardımcı GNSS arayüzü |
GNSS modülüne VERİCİ veri çıkışı |
| 20 |
SYNC_PPS |
Yardımcı GNSS arayüzü |
GNSS modülünden saniye başına darbe girişi |
Parametre ayarları
Ürün, açıldığında varsayılan olarak "sürekli çıkış" durumuna geçer ve parametreleri ayarlamak için önce "çıkışı durdur" komutunun gönderilmesi gerekir. Dikkat: Aşağıdaki komutu kullandıktan sonra, sürekli iletim durumuna otomatik olarak geçmek için kullanıcının gücü açması ve yeniden başlatması gerekir.
1 Durdurma çıkışı
Çıkışın durdurulması, güçteki varsayılan "sürekli çıkış" durumunu "parametre ayarı" durumuna geçirmektir.
Gönderilen: * PA alanı GS01 alanı STOP satırbaşı dönüşü
Cevap vermek:
* PA alanı GS01 alanı STOP alanı 0 satır başı başarısız
*PA alanı GS01 alanı STOP alanı 1 satır başı başarılı
2 Çalışma senaryolarını ayarlayın
Ürünün filtre parametrelerini farklı uygulama senaryolarına göre değiştirmesi gerekir. Çalışma senaryoları, güç açma için varsayılan yerleşik senaryoyla birlikte, araca monteli, iç mekan (sallanır masa), Gemi tahtası, sabit kanat ve rotoru içerir.
Sahne değiştirme, açıldığında varsayılan "araba sahnesini" gerçek sahneye değiştirmek içindir.
Gönder: * PA alanı GS01 alanı SAHNELER alanı 1 satır başı
Cevap vermek:
* PA alanı GS01 alanı SAHNELER alanı 1 boşluk 0 satır başı başarısız
*PA alanı GS01 alanı SAHNELER alanı 1 boşluk 1 satır başı Başarılı
Not: Altı çizili karakterler 1- kabine monteli, 2- bina içi, 3- gemiye monteli, 4- sabit kanatlı ve 5- rotorlu opsiyoneldir.
3 Ayarlı Baud Hızı
Açılış için varsayılan baud hızı 230400bps'dir ve komutlar gönderilerek değiştirilebilir.
Gönder: * PA alanı GS01 alanı BAUD alanı 1 satır başı
Cevap vermek:
* PA boşluk GS01 boşluk BAUD boşluk 1 boşluk 0 satır başı başarısız
*PA alanı GS01 alanı BAUD alanı 1 boşluk 1 satır başı Başarılı
Not: Altı çizili karakterlerin içeriği isteğe bağlı olarak 1-115200bps, 2-230400bps ve 3-460800bps'dir.
4 Fabrika ayarlarını geri yükleyin
Fabrika ayarlarının geri yüklenmesi, çalışma ortamının, çerçeve formatının, baud hızının, manyetik sapmanın ve manyetik alan kalibrasyonunun varsayılan değerlere ayarlanmasını içerir.
Gönder: * PA alanı GS01 alanı RESET satır başı
Cevap vermek:
* PA alanı GS01 alanı RESET alanı 0 satırbaşı başarısız
*PA alanı GS01 alanı RESET alanı 1 satırbaşı Başarılı
5 Manyetik sapma açısını ayarlayın
Varsayılan manyetik sapma, pozitif manyetik kuzey doğu ve negatif manyetik batı olmak üzere 0'dır.
Gönder: * PA alanı GS01 alanı MDEC alanı+/- XX.XX satırbaşı
Cevap vermek:
* PA alanı GS01 alanı MDEC alanı 0 satırbaşı başarısız
*PA alanı GS01 alanı MDEC alanı 1 satır başı başarılı
Not: Manyetik sapma açısı -2,5 derece ise alt çizgi dizisi -02,50'dir; Manyetik sapma açısı +1,5 derece ise alt çizgi dizisi +01,50 olur.
6 Manyetik alan kalibrasyonu
Manyetik sensörlerin çalışmasında BT'nin, manyetik sensör tarafından ölçülen XYZ ekseni manyetik alan kuvvetinin değişen derecelerde sapmasına ve deformasyonuna yol açabilen çevredeki elektromanyetik alanların girişiminden etkilenmesi kaçınılmazdır. Manyetik alan kalibrasyonu, çevredeki manyetik alan ortamının algoritma öğrenimi yoluyla yumuşak ve sert manyetik girişimi telafi etmektir. Bu nedenle, her kurulumdan sonra ve manyetik alan ortamındaki değişikliklerden sonra manyetik alan kalibrasyonunun uygulanmasını şiddetle tavsiye ederiz.
Manyetik alan kalibrasyonu yapılırken, ürün döndürme işlemi ve ürünün göreceli konumu sırasında çevredeki girişim yapan maddelerin değişmeden kalması (yani ürünle birlikte dönmesi) gerekir. Kalibrasyon, operatörün vücudundaki elektromanyetik alanı etkileyebilecek cep telefonu, manyetik kart, anahtar veya metal veya elektrikli cihaz bulundurmamasını gerektirir.
DİKKAT: Manyetik alan kalibrasyon işleminin yalnızca sınırlı girişim aralığı dahilinde telafi etkisi olabilir. Manyetik sensörün menzili yaklaşık olarak artı ve eksi 1 Gauss arasındadır, bu da kuzey yarımküredeki jeomanyetik alanın yaklaşık iki katıdır. Manyetik alan girişim değeri artı veya eksi 0,5 Gauss'u aşarsa manyetometre doyum durumuna ulaşabilir ve bu da telafi etkisini engeller. Kalibrasyon başarısız olduğunda BT sorunun oluştuğunu belirtir.
2 boyutlu kalibrasyon
Not: Ürün 3D olarak dönemediğinde 2D kalibrasyon kullanılabilir. Ürünün gerçek eğim açısının 5 dereceden az olması tavsiye edilir. 2D kalibrasyon, komutlar verilerek arayüz veya seri port üzerinden tamamlanabilir.
1. Kalibrasyonu başlatın: Kullanıcı kalibrasyonundan önce,
Gönder: * PA alanı GS01 alanı MCAL alanı START satır başı
Cevap vermek:
* PA alanı GS01 alanı MCAL alanı START alanı 0 satır başı başarısız
*PA alanı GS01 alanı MCAL alanı START alanı 1 satır başı başarılı
2 Kalibrasyonu durdurun: Yatay dönüşü 2 turdan fazla başlatın ve tamamlandıktan sonra gönderin
Gönder: * PA alanı GS01 alanı MCAL alanı END satır başı
Cevap vermek:
* PA alanı GS01 alanı MCAL alanı 0 satırbaşı başarısız
*PA alanı GS01 alanı MCAL alanı 1 alanı X: x.xx alanı Y: y.yy satırbaşı Başarılı
Not: Kalibrasyon sonuçlarının 0,90-1 olarak döndürülmesi, iyi kalibrasyon sonuçlarına işaret ederken, >1,1 veya <0,9, kötü kalibrasyon sonuçlarına işaret eder.
3. Kalibrasyon sonuçlarını kaydedin: Kullanıcı kalibrasyonundan sonra, kalibrasyon sonuçlarına göre kaydedilip kaydedilmeyeceğine karar verin.
Gönder: * PA alanı GS01 alanı MCAL alanı SAVE satır başı
Cevap vermek:
* PA alanı GS01 alanı MCAL alanı SAVE alanı 0 satır başı başarısız
*PA alanı GS01 alanı MCAL alanı SAVE alanı 1 satırbaşı Başarılı
4. Kalibrasyon sonuçlarını temizle: Kalibrasyondan sonra kullanıcı, kalibrasyon sonuçlarına göre silme işlemi yapılıp yapılmayacağına karar verir.
Gönder: * PA alanı GS01 alanı MCAL alanı CLEAR satır başı
Cevap vermek:
* PA alanı GS01 alanı MCAL alanı CLEAR alanı 0 satır başı başarısız
*PA alanı GS01 alanı MCAL alanı CLEAR alanı 1 satır başı Başarılı
Auygulamalar
Minyatür hava araçları
• Teslimat drone'ları
• Video drone'lar
• Tarımsal İHA'lar
Makineler
• Hareket Halinde Satcom (SotM)
• İnşaat makineleri
• GEMİ GÖZETİMİ
Robotik
• Otonom tarım
• Depo otomasyonu
• Robotik kollar
Diğer uygulamalar
• Elde taşınan cihazlar
• Yaya navigasyonu
• VR/AR ve HMD'ler
• Navigasyon yardımı
Destek ve Hizmetler:
Jiroskop Sensörüne ilişkin Teknik Destek ve Hizmetlerimize hoş geldiniz. Özel ekibimiz, jiroskop sensörünüzün kullanımı, kurulumu veya bakımı ile ilgili olabilecek her türlü teknik sorun veya sorunuzda size yardımcı olmak için buradadır. Ürününüzün en iyi şekilde çalışmasını sağlamak için size mümkün olan en iyi desteği sağlamaya kararlıyız.
Desteğimiz, genel sorunları hızlı bir şekilde çözmenize yardımcı olmak için tasarlanmış ayrıntılı ürün belgelerini, sık sorulan soruları (SSS'ler) ve sorun giderme kılavuzlarını içerir. Daha karmaşık veya spesifik konular için teknik destek ekibimiz kişiselleştirilmiş yardım sağlamaya hazırdır.
Daha fazla yardıma ihtiyaç duyarsanız lütfen profesyonel teknik destek ekibimizle iletişime geçmek için ek kaynaklar ve destek kanalları bulabileceğiniz web sitemizin 'Bize Ulaşın' bölümüne bakın (iletişim bilgileri istek üzerine hariç tutulmuştur).
Elektronik Jiroskop Sensörümüzü seçtiğiniz için teşekkür ederiz. Size hizmet etmek ve projelerinizin başarısını sağlamak için sabırsızlanıyoruz
Paketleme ve Nakliye:
Elektronik Jiroskop Sensörü, elektrostatik boşalmaya (ESD) karşı koruma sağlamak için antistatik bir torba içinde titizlikle paketlenmiştir. Daha sonra sensör, nakliye sırasında üstün şok emilimi sağlayan, özel olarak takılan, yüksek yoğunluklu bir köpük kalıpla güvenli bir şekilde kaplanır. Bu köpük, sensörü çevresel faktörlerden ve nakliye sırasında olası hasarlardan koruyan dayanıklı, markalı bir karton kutu içine yerleştirilmiştir.
Kutunun dış kısmında ürün adının yer aldığı anlaşılır etiketler, kullanım talimatları ve kolay takip için bir barkod bulunur. Tüm paketlerimiz, ek bir güvenlik katmanı sunan, kurcalanmaya karşı dayanıklı bantla kapatılmıştır.
Nakliye için Elektronik Jiroskop Sensörü, zamanında ve güvenli teslimatı sağlamak amacıyla güvenilir bir kurye hizmeti aracılığıyla gönderilir. Yatırımınız için gönül rahatlığı ve koruma sunan, ürünün tam değeri için sigortayı dahil ediyoruz. Takip bilgileri, paket gönderilir gönderilmez sağlanarak, gönderinin varış noktasına ulaşana kadar gerçek zamanlı olarak izlenmesine olanak tanır.

 Mesajınız 20-3.000 karakter arasında olmalıdır!
Mesajınız 20-3.000 karakter arasında olmalıdır! english
english
 français
français
 Deutsch
Deutsch
 Italiano
Italiano
 Русский
Русский
 Español
Español
 português
português
 Nederlandse
Nederlandse
 ελληνικά
ελληνικά
 日本語
日本語
 한국
한국
 العربية
العربية
 हिन्दी
हिन्दी
 Türkçe
Türkçe
 indonesia
indonesia
 tiếng Việt
tiếng Việt
 ไทย
ไทย
 বাংলা
বাংলা
 فارسی
فارسی
 polski
polski